

はじめに
Arduinoを使って、自作のリモートコントロールカーを作ってみましょう。本記事では、Arduinoと無線通信モジュール(BluetoothまたはWi-Fi)を利用し、スマホや専用コントローラーで操作できるRCカーの作成方法を解説します。
また、ESP32で音声アシスタントを作る実験 などと組み合わせれば、音声コントロール機能を追加することも可能です。
システムの概要
本プロジェクトでは、以下のような機能を備えたスマートRCカーを作成します。
- モーター駆動による前後進・左右旋回
- BluetoothまたはWi-Fi経由でスマホアプリから制御
- 超音波センサーを利用した障害物回避機能(オプション)
- バッテリー駆動によるワイヤレス動作
- カメラ搭載(オプション)で映像ストリーミング可能
必要な部品
| 部品名 | 用途 |
|---|---|
| Arduino Uno または ESP32 | 車の制御を行うマイコン |
| L298N モータードライバー | DCモーターを制御するためのドライバー |
| DCモーター ×2 | 車輪を駆動 |
| ホイール付きシャーシ | 車体の基盤 |
| HC-05 Bluetoothモジュール(またはESP8266) | スマホやコントローラーと通信 |
| 超音波センサー(HC-SR04) | 障害物検知(オプション) |
| バッテリーパック(18650リチウム電池) | ワイヤレス駆動用電源 |
| ジャンパーワイヤー | 配線用 |
配線と回路図
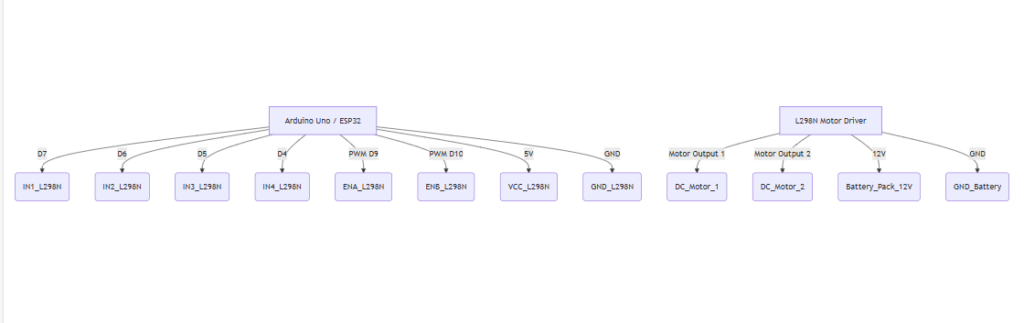
モータードライバーの接続(L298N)
| L298N ピン | Arduino ピン |
| IN1 | D7 |
| IN2 | D6 |
| IN3 | D5 |
| IN4 | D4 |
| ENA | 5V(PWM制御可) |
| ENB | 5V(PWM制御可) |
| GND | GND |
| 12V | バッテリー + |
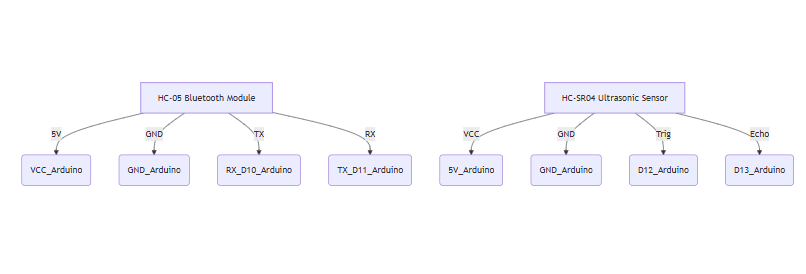
Bluetoothモジュール(HC-05)の接続
| HC-05 ピン | Arduino ピン |
| VCC | 5V |
| GND | GND |
| TX | RX (D10) |
| RX | TX (D11) |
プログラムの実装
1. モータードライバー制御コード
#define IN1 7
#define IN2 6
#define IN3 5
#define IN4 4
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void forward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void backward() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void stopCar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}2. Bluetooth制御コード
スマホアプリ(Arduino Bluetooth Controller など)と連携し、コマンドを受信。
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(10, 11);
void loop() {
if (BTSerial.available()) {
char command = BTSerial.read();
if (command == 'F') forward();
else if (command == 'B') backward();
else stopCar();
}
}応用機能の追加
1. Wi-Fi制御(ESP32)
Bluetoothの代わりにWi-Fiで制御すれば、インターネット経由で遠隔操作が可能になります。
2. 障害物回避機能
超音波センサーを使って障害物を検知し、自動で停止する機能を追加。
3. カメラ搭載(ESP32-CAM)
**ESP32で音声アシスタントを作る実験**と組み合わせ、ESP32-CAMで車載カメラを搭載し、ストリーミング映像を確認しながら遠隔操作も可能です。
よくあるトラブルと解決策
1. モーターが動かない
- バッテリーの電圧が不足していないか確認。
- L298Nの電源接続が適切かチェック。
2. Bluetoothが接続できない
- スマホのBluetooth設定でHC-05がペアリングされているか確認。
- ボーレートが一致しているか(9600bps推奨)。
3. Wi-Fiが不安定
- 2.4GHzのWi-Fiを使用(ESP32は5GHz非対応)。
- ルーターとの距離を近づける。
まとめ
本記事では、Arduinoを使ったスマートリモートコントロールカーの作成方法を解説しました。
学んだこと
- モータードライバー(L298N)を使用したモーター制御
- Bluetooth / Wi-Fiを活用したリモートコントロール
- 障害物回避やカメラ連携の応用方法
また、**ESP32で音声アシスタントを作る実験**などと組み合わせ、さらに高度なRCカーを作ることもできます。ぜひ、自作のRCカーをカスタマイズしてみてください!


コメント